Modern Robotics, Chapter 4: Forward Kinematics Example Northwestern Robotics 3:28 7 years ago 44 146 Далее Скачать
Modern Robotics, Chapter 4.1.1: Product of Exponentials Formula in the Space Frame Northwestern Robotics 6:31 7 years ago 36 092 Далее Скачать
Modern Robotics, Chapter 4.1.2: Product of Exponentials Formula in the End-Effector Frame Northwestern Robotics 4:41 7 years ago 17 880 Далее Скачать
Product of Exponentials Formula in the Space Frame (Chapter 4 through 4.1.2) - Modern Robotics, Do Hoai Nam 6:31 4 years ago 65 Далее Скачать
Forward Kinematics (with solved examples) | Homogeneous Transformations | Robotics 101 Engineering Simplified 12:16 2 years ago 67 001 Далее Скачать
Trigonometry: Forward Kinematics Example Mr. Kruger's Mathematics 16:26 7 years ago 102 054 Далее Скачать
Forward Kinematics of 2D Manipulator | forward kinematics robotics example ROBOMECHTRIX 2:06 7 years ago 47 925 Далее Скачать
CalcBLUE 1 : Ch. 3.2 : Example - Robot Kinematics Prof Ghrist Math 2:33 6 years ago 8 926 Далее Скачать
Robotics Lec 4a: 2D, 2-link manipulator forward kinematics (Fall 2022) Pranav Bhounsule 16:49 2 years ago 603 Далее Скачать
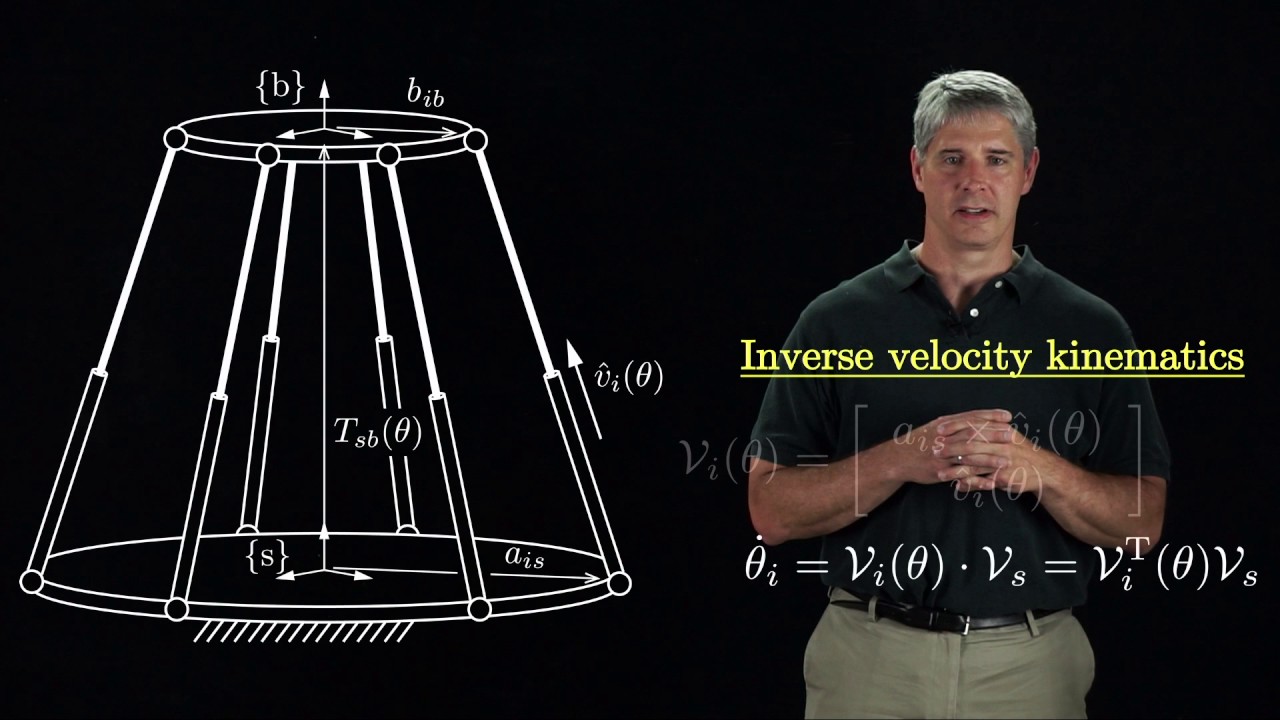
Modern Robotics, Chapter 7: Kinematics of Closed Chains Northwestern Robotics 8:34 7 years ago 45 400 Далее Скачать